English
English हिन्दी
हिन्दी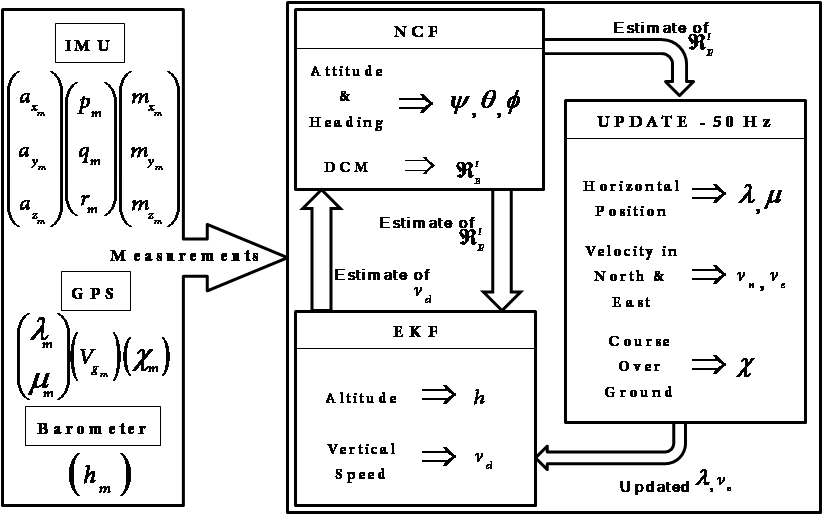
Real time sensor fusion architecture for Unmanned aerial vehicles
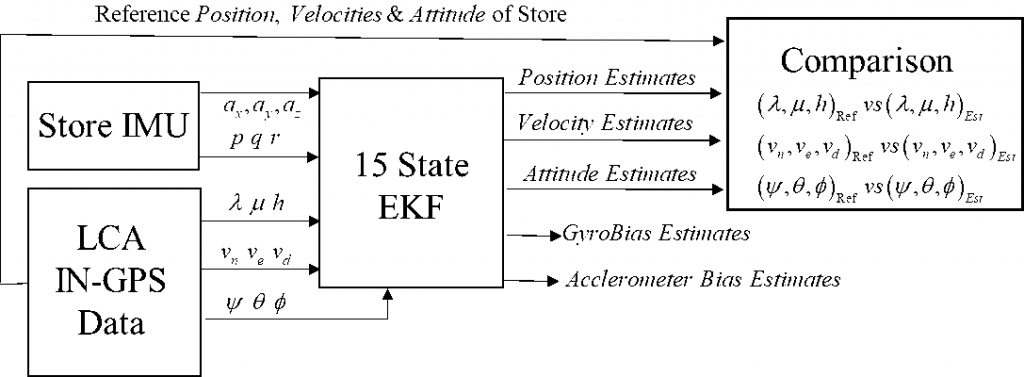
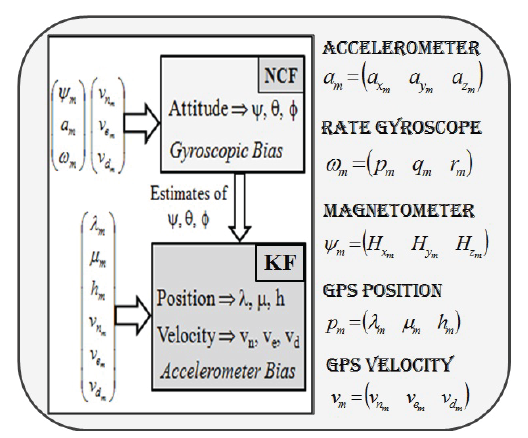
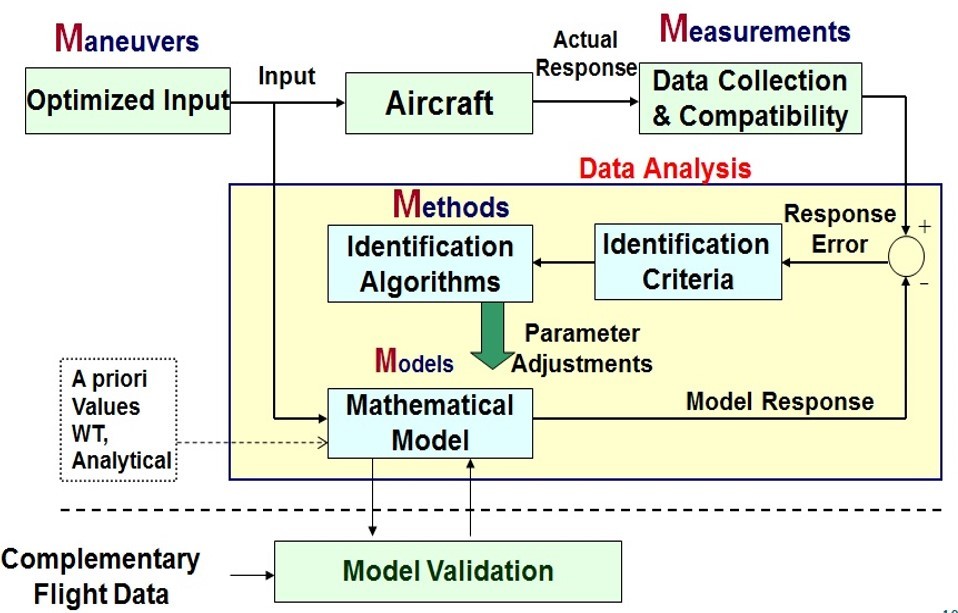
Novel sensor fusion architecture is proposed to provide complete navigational solution for micro aerial vehicles (MAV) using low cost sensors and micro controller. The approach uses a nonlinear complementary filter (NCF) to estimate direction cosine matrix (DCM), the estimated attitude and heading from DCM are used in turn to predict MAV position in North and East direction and a two state extended Kalman filter (EKF) based estimator to estimate altitude and vertical speed. The fusion algorithm uses tri-axial accelerometers, rate gyroscopes & magnetometers, pressure altitude and global positioning system (GPS) measurements. The proposed architecture is computationally less intensive and is implemented for real time application on a low cost microcontroller based autopilot board to provide the complete navigational solution at 50 Hz.
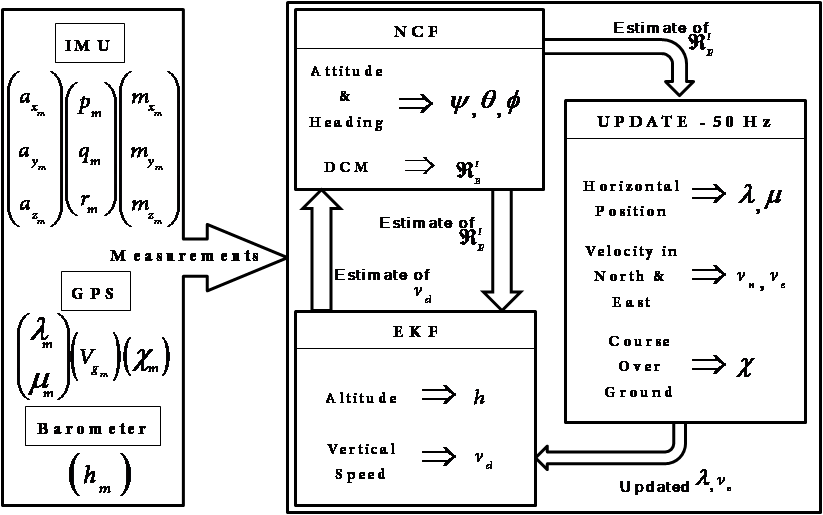
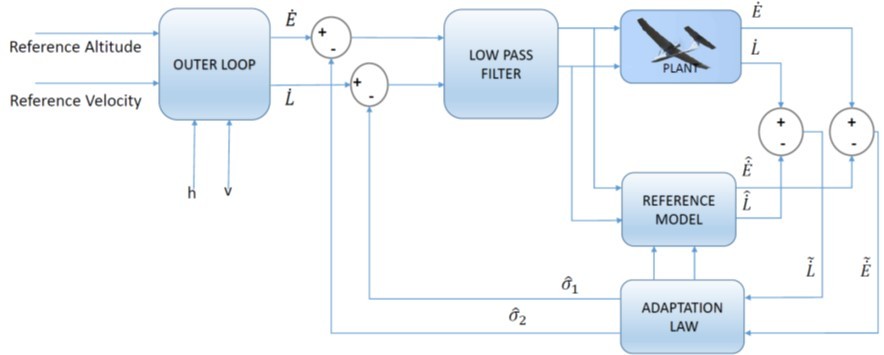
Schematic of proposed sensor fusion architecture