English
English हिन्दी
हिन्दी
Sliding mode control techniques for Micro Aerial Vehicles
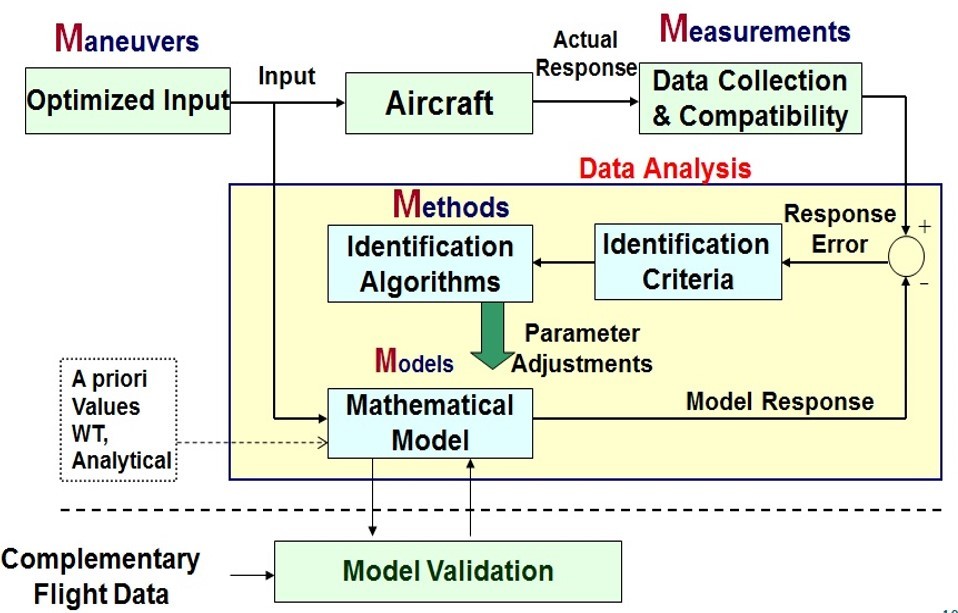
Advancement in Sliding mode control (SMC) in the past few decades has helped researchers in solving many interesting practical control problems, like robotics control, electromechanical system control, nuclear reactor, missile control and control of aerial vehicles so on and so forth. The motivation of using this technique is to explore the methodology in solving control problems and challenges faced by Micro Aerial Vehicles. Micro Aerial Vehicles are autonomous and remotely controlled unmanned vehicles and have gained a high level of popularity during the last decade both in civilian and military applications. I have provided an end-to-end solution from the control design point of view for a Micro Aerial Vehicle in the framework of sliding mode control to overcome the uncertainties and unmodeled nonlinearities inherently present in its dynamics.
To overcome the challenges faced by the MAV flight control designers, it is essential to use a robust control technique like Sliding Mode Control (SMC) with unique properties to tackle the parametric uncertainties and external disturbances. Most of the practical applications in the industry are based on classical control strategies, however with the emergence of research on nonlinear control theories certain limited applications of advanced robust control technique for the control of MAVs have been reported in the literatures. Sliding mode stems from the concept of variable structure control, well developed in theory and are being used in many industrial applications. It has many interesting properties of being robust to parameter uncertainties, external disturbances and simplicity in the design procedure etc. Advances in SMC theory and its application reported in the literature in solving many practical problems are the main motivation behind using this technique.
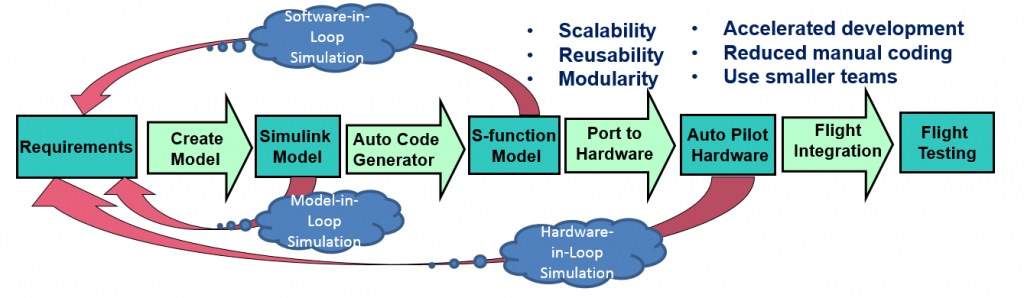
Facilities where this techniques is used: Hardware – in - the loop simulation facility.
Major milestones / results of this technique:
- The problem of designing robust stabilizing control laws for nonlinear 6 DoF aircraft model in the presence of actuator nonlinearities and parametric uncertainties has been addressed. A novel reaching law based 1-sliding control design to overcome the actuator nonlinearities like dead zone and backlash has been carried out. The controller is designed to ensure robust performance even in the presence of actuator nonlinearities and the model variations from the nominal one. Extensive simulation results are presented to ensure the performance of the controller.
- The concept of super twisting control well dealt by many researchers in the literature is explored and applied in the design and development of output feedback based autopilot tracking control laws for MAVs. Pitch and bank angle tracking controller are designed to enable the MAV to do autonomous navigation, ensuring the zero dynamics of the plant model is stable. A new stability proof based on Lyapunov analysis is provided in the framework of sliding mode technique to show that the zero dynamics of the longitudinal plant model is stable during pitch angle tracking. Extensive comparative study of SMC performance against classical PID were also carried out.
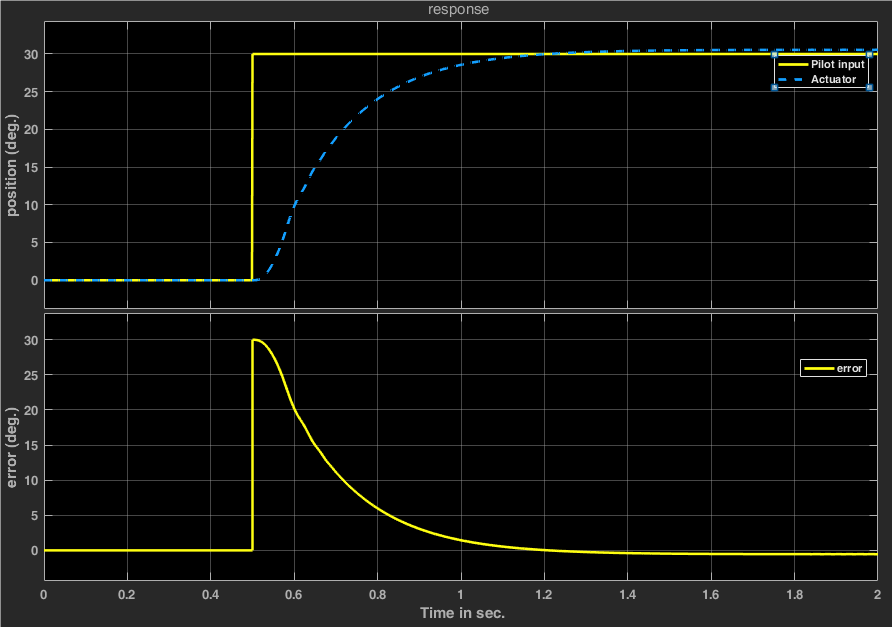
- Design of autopilot control laws for a non-minimum phase (NMP) MIMO MAV model has been carried out. Output tracking control law for an MAV with stable zero dynamics and Dynamic sliding surface based output tracking controller for a NMP system with unstable zero dynamics are the two different controllers explored in my PhD thesis. Time varying reference trajectory tracking control problem has been solved for both minimum phase and nonminimum phase plant. Both the control algorithms are implemented in autopilot hardware and extensive Hardware In-Loop Simulations (HILS) has been carried out. The proposed control algorithms are implemented on PX4 based pixhawk autopilot hardware and performance verification of the control algorithms has been carried out with the autopilot hardware and actual servo actuator in-loop.
- Extensive design analysis and simulation studies on these topics published in the journals and conferences will certainly kindle interest in researchers to implement sliding mode technique for fixed wing MAV on autopilot hardware module and carry out real time fight testing.