English
English हिन्दी
हिन्दी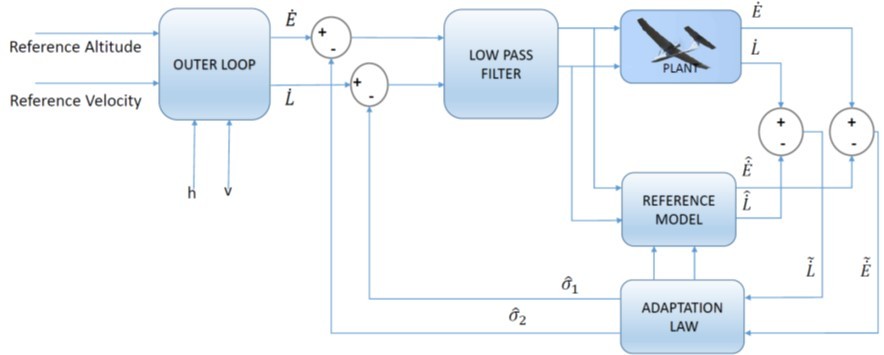
L1 adaptive control with applications to aerospace vehicles
Longitudinal flight control system designed based on total energy control system (TECS) using ℒ1 adaptive control theory. The proposed composite control architecture utilizes the advantages of both ℒ1 adaptive control and total energy based control. This multi input multi output control law commands throttle and elevator simultaneously to achieve the required tracking and stabilization thereby avoiding significant change in speed or altitude.
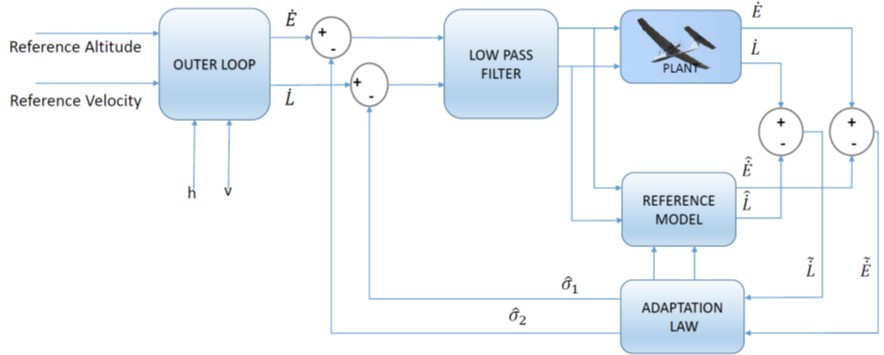
Figure 1 L1 adaptive output feedback Controller based Energy control
A novel ℒ1 adaptive based control, augmenting a fixed gain Linear Quadratic Regulator (LQR) control for leader-follower based decentralized formation flying investigated. In particular, we propose this algorithm to maintain the triangle formation of three micro air vehicles. The designed formation control algorithm generates normal and tangential acceleration commands, which can be accurately tracked by the inner loop of the followers’ autopilot.
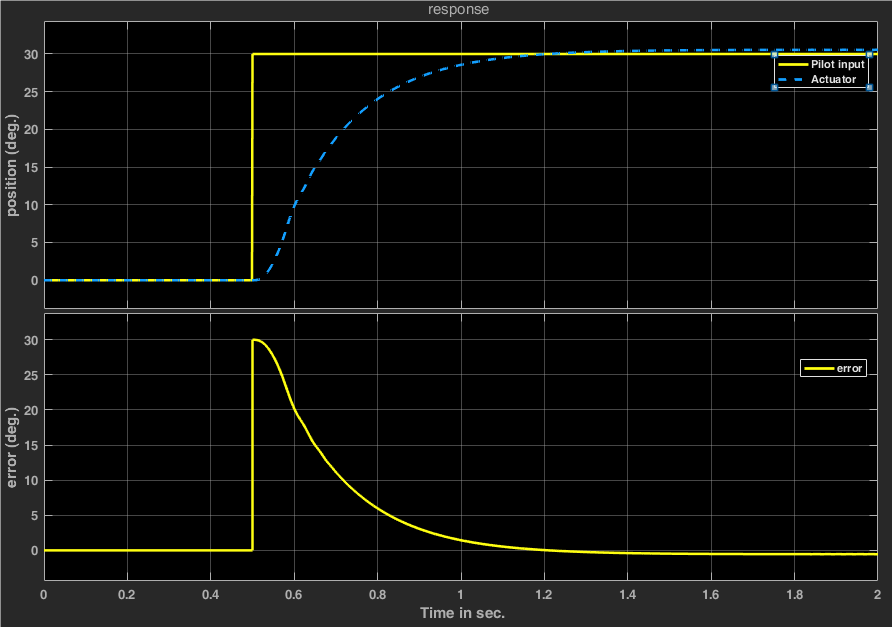
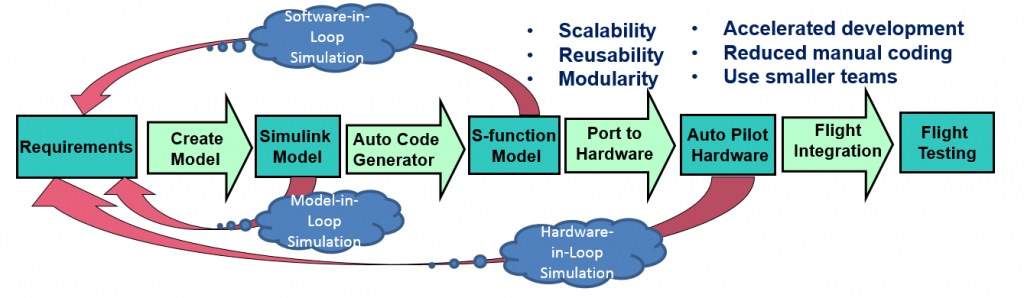
Design of L1 - adaptive based inner loop control architecture for MAV. It consists of base line state feedback controller augmented with L1 Adaptive control. The robust adaptive control adapts to the changes in system dynamics and facilitates improved command tracking for UAV's. The pitch and roll tracking control loops designed using linear models and analyzed for possible failures. The simulations studies carried out to demonstrate the effectiveness and adaptation of designed control loops.