English
English हिन्दी
हिन्दी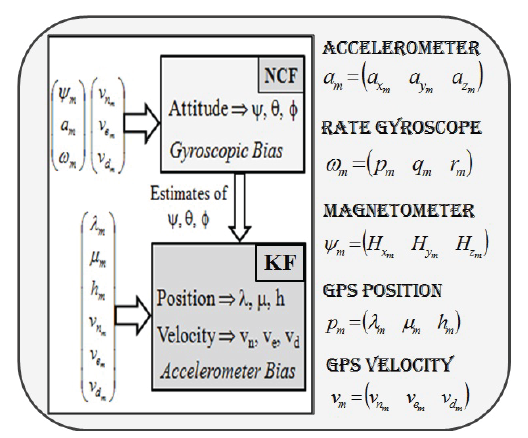
EKF based algorithms for INS/GPS fusion for UAVs
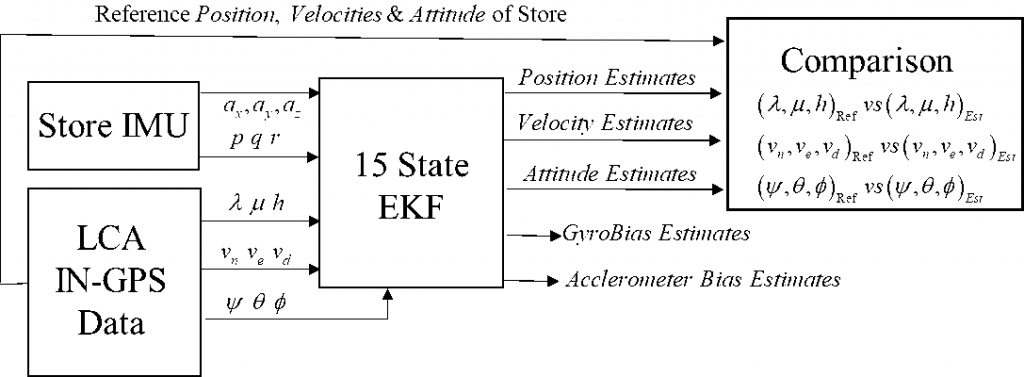
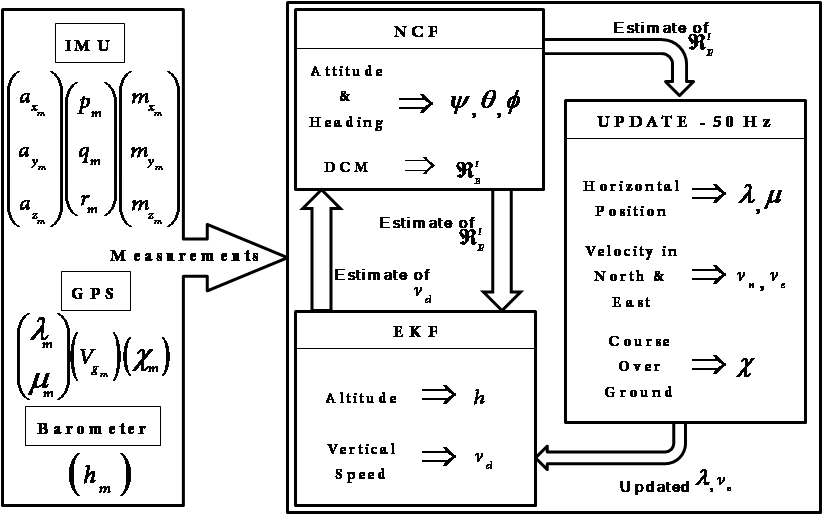
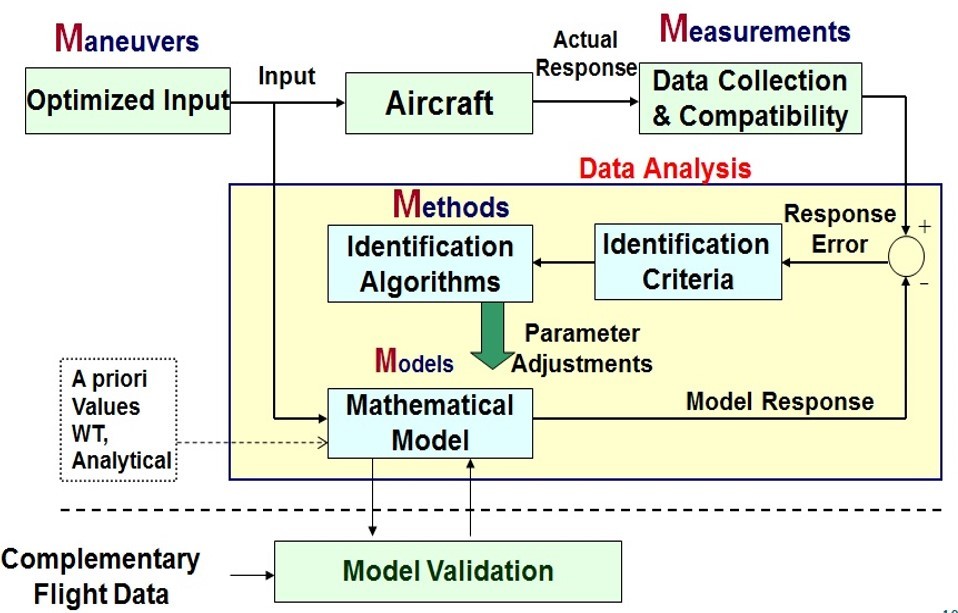
The design of an EKF is addressed for the purpose of estimating the position, velocity, attitude and heading of an Aircraft. While, estimating the attitude and heading of an aircraft is typically addressed via an AHRS formulation, estimating the position, velocity along with the attitude and heading of an aircraft is conventionally studied under the INS formulation. The approach uses onboard tri-axial accelerometers, tri-axial rate gyroscopes & tri-axial magnetometers and GPS measurements, as an external reference, to aid the EKF algorithm. The design of an EKF was carried out for a nine, twelve, fifteen state as well as a split architecture EKF. In the split architecture, the observability of each individual model is guaranteed thereby ensuring that all the 15 states are observable via this architecture. A 15-state extended Kalman filter (EKF) and a split architecture consisting of six-state nonlinear complementary filter (NCF) and nine-state EKF are investigated in detail. In both these fusion architectures GPS and inertial measurement unit consisting of three axis accelerometers, three axis rate gyros and three axis magnetometer have been fused in open loop fashion (loosely coupled) to estimate the navigation states.
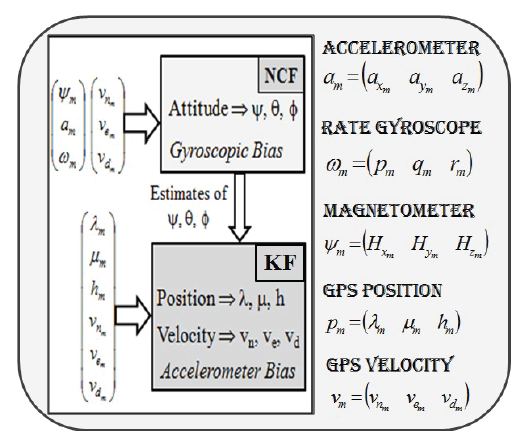
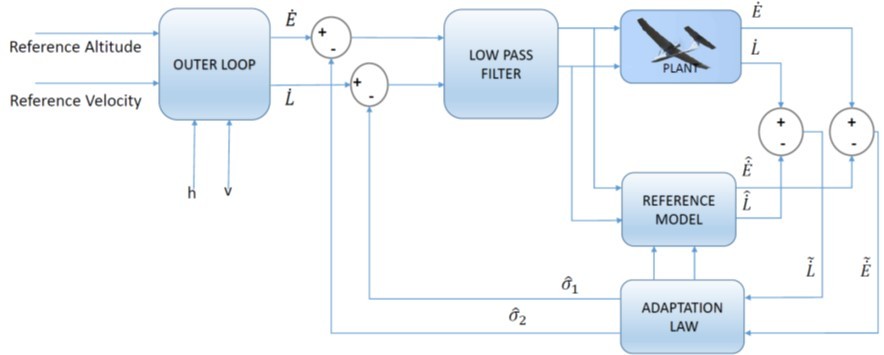
Split Architecture INS/GPS Fusion