English
English हिन्दी
हिन्दी
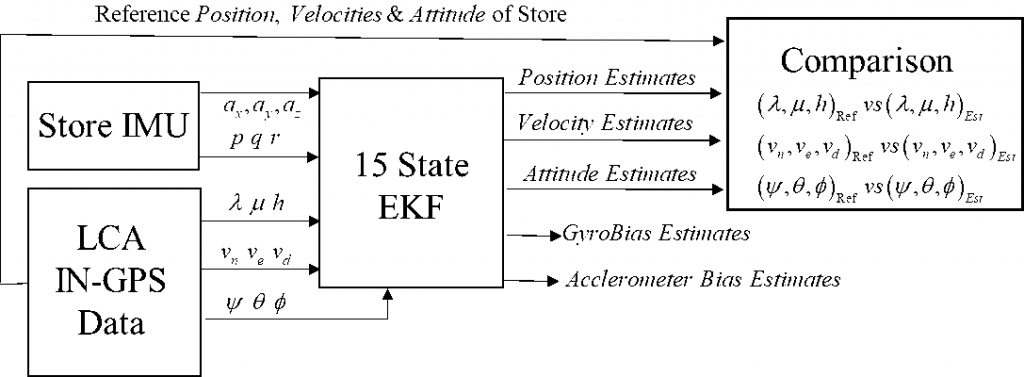
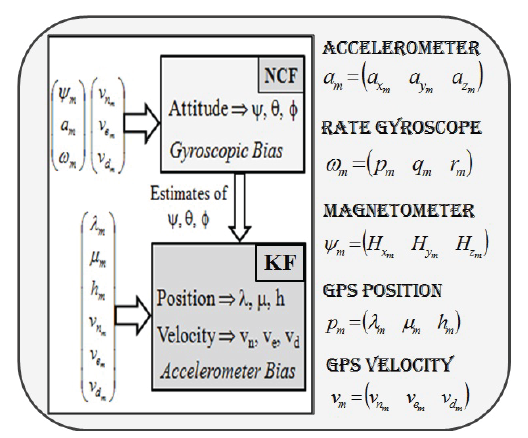
EKF based algorithms for attitude and Heading estimation of UAV
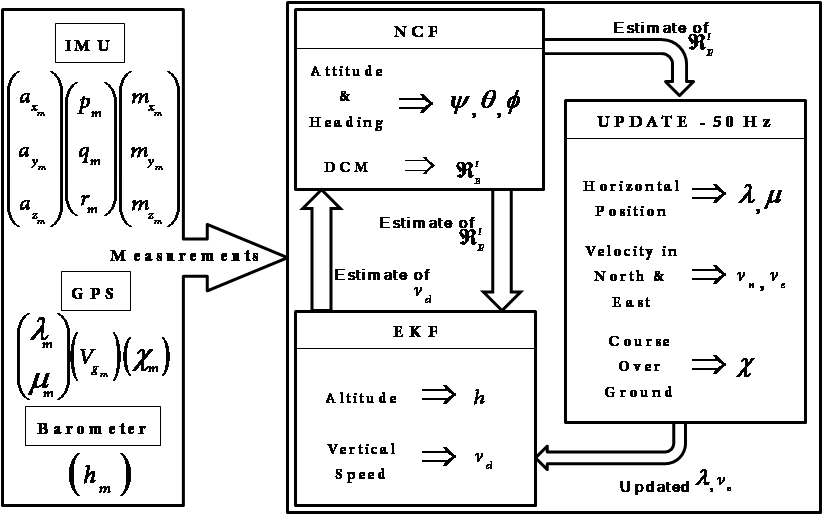
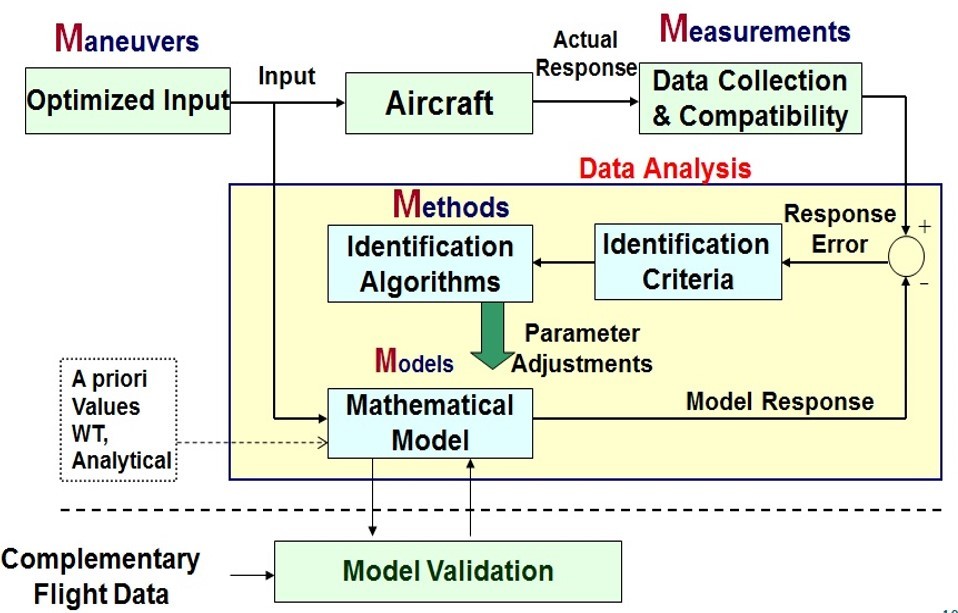
Extended Kalman filter (EKF) solution for attitude and heading estimation was proposed with code phase GPS measurements aiding the micro electro mechanical systems (MEMS) Inertial Measurement Unit (IMU). The estimation was carried out assuming GPS update rates of 1, 4, 5 and 10 Hz while the IMU update rate was assumed to be 40 Hz. GPS outage durations of 20 s and 15 s were considered for a total simulation duration of 500 s. The role of GPS measurements and its update rate for attitude and heading estimation is brought out clearly. The design, development and simulation studies of the EKF are carried out. 1000 Monte Carlo simulations, each of 500 s, with and without GPS outages are carried out to check the robustness of the proposed estimator.