English
English Hindi
Hindi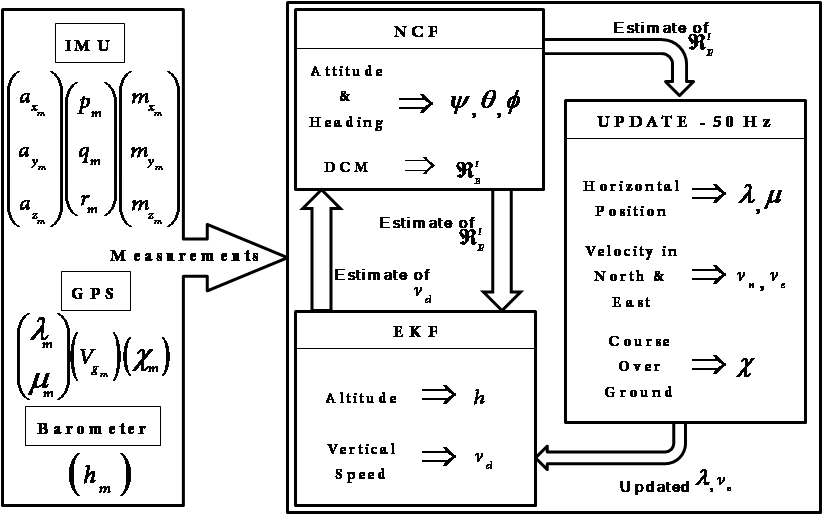
मानव रहित वायवी यानों के लिए वास्तविक समय संवेदक संलयन आर्किटेक्चर
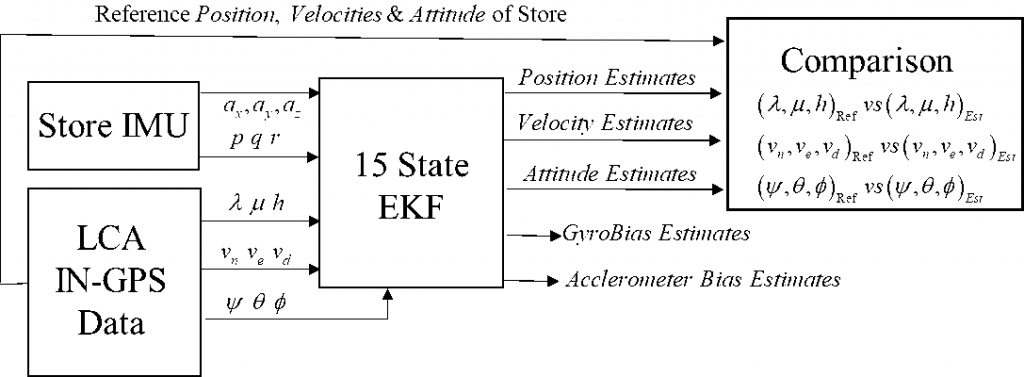
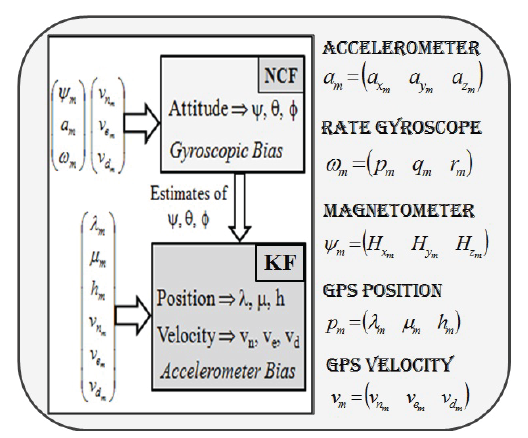
सूक्ष्म वायवी यानों (एमएवी) के लिए पूर्ण नेविगेशन समाधान प्रदान करने हेतु नए संवेदक संलयन आर्किटेक्चर को कम लागत संवेदक और सूक्ष्म नियंत्रक का उपयोग करने का प्रस्ताव है। यह दृष्टिकोण डारेक्शन कोसाइन मैट्रिक्स (डीसीएम) के आकलन हेतु नानलीनियर काम्प्लिमेंटरी फिल्टर (एनसीएफ) का प्रयोग करता है, आकलित दृष्टिकोण और डीसीएम से उत्तर और पूर्व दिशा में एमएवी स्थिति के पूर्वानुमान हेतु किया जाता है और दो विस्तारित कलमान फ़िल्टर (ईकेएफ) आधारित ऊंचाई और लंबवत गति का अनुमान लगाने के लिए आकलित किया जाता है। संलयन एल्गोरिथम त्रि-अक्षीय एक्सेलेरोमीटर, रेट जीरोस्कोप और मैग्नेटोमीटर, दाब ऊंचाई और वैश्विक पोजिशनिंग सिस्टम (जीपीएस) मापन का उपयोग करता है। प्रस्तावित आर्किटेक्चर गणकीय रूप से कम गहन है और 50 हर्ट्ज पर पूर्ण नेविगेशन समाधान प्रदान करने के लिए कम लागत वाले माइक्रोकंट्रोलर आधारित ऑटोपायलट बोर्ड पर वास्तविक समय अनुप्रयोग के लिए लागू किया गया है।
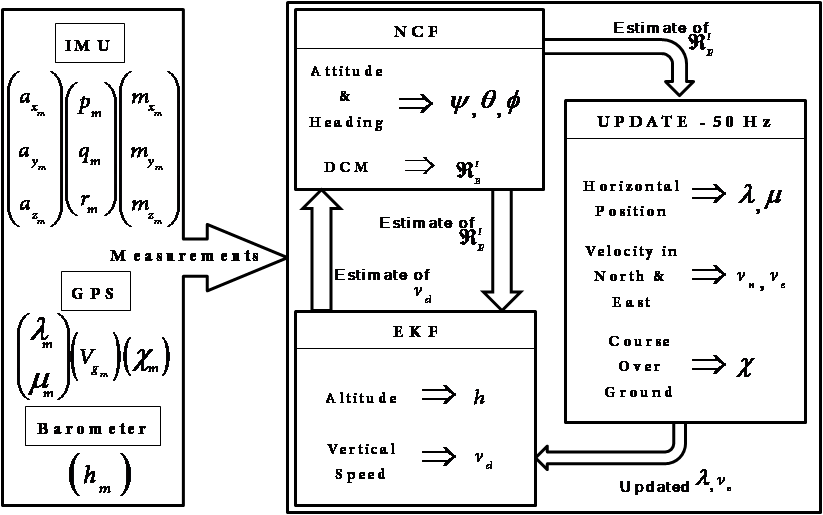
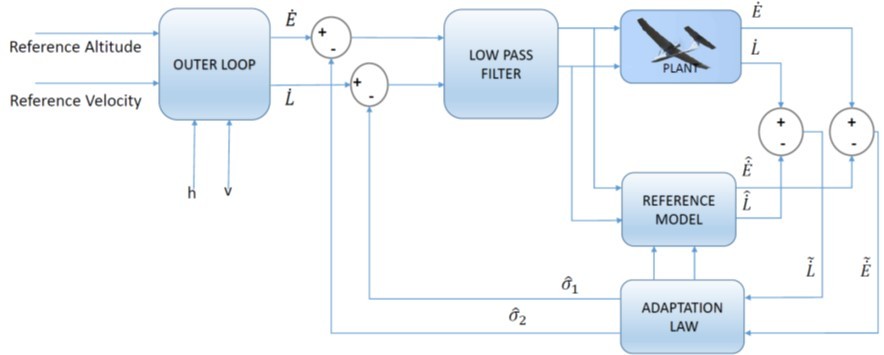
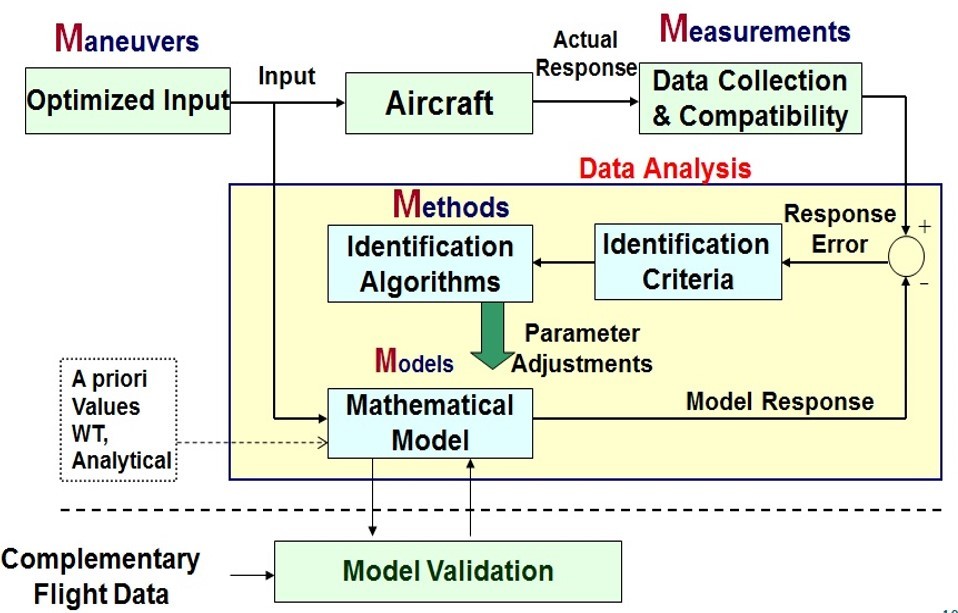
प्रस्तावित सेंसर संलयन वास्तुकला के योजनाबद्ध