English
English Hindi
Hindi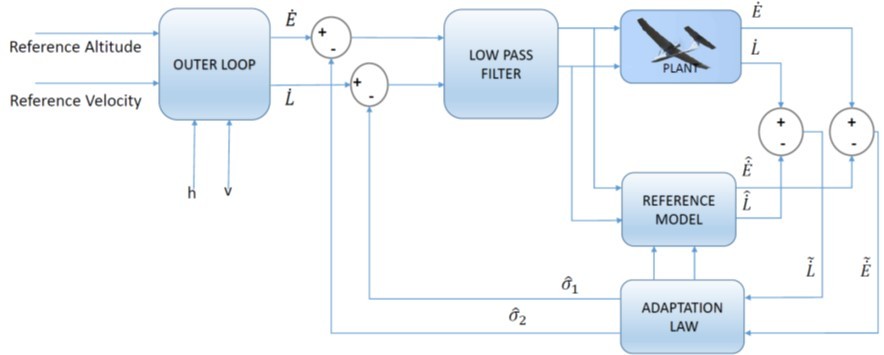
वांतरिक्ष यानों के लिए एल1 अनुकूलक नियंत्रण अनुप्रयाग
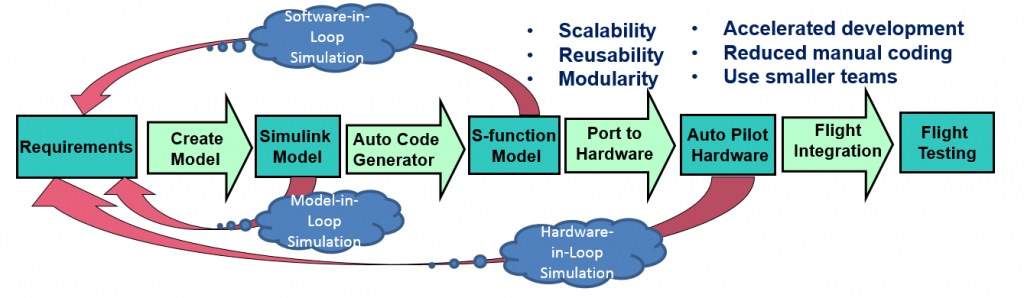
अनुदैर्ध्य उड़ान नियंत्रण प्रणाली ℒ1 अनुकूलक नियंत्रण सिद्धांत के प्रयोग से कुल ऊर्जा नियंत्रण प्रणाली (टीईसीएस) के आधार पर तैयार की गई है। प्रस्तावित सम्मिश्र नियंत्रण आर्किटेक्चर ℒ1 अनुकूलक नियंत्रण और कुल ऊर्जा आधारित नियंत्रण दोनों के लाभों का उपयोग करता है। यह मल्टी इनपुट मल्टी आउटपुट नियंत्रण विधि आवश्यक ट्रैक और स्थिरीकरण को प्राप्त करने हेतु थ्राटल और एलेवेटर का उपयोग एक साथ करता है जिससे गति या ऊंचाई में महत्वपूर्ण परिवर्तन से बचा जा सकता है।
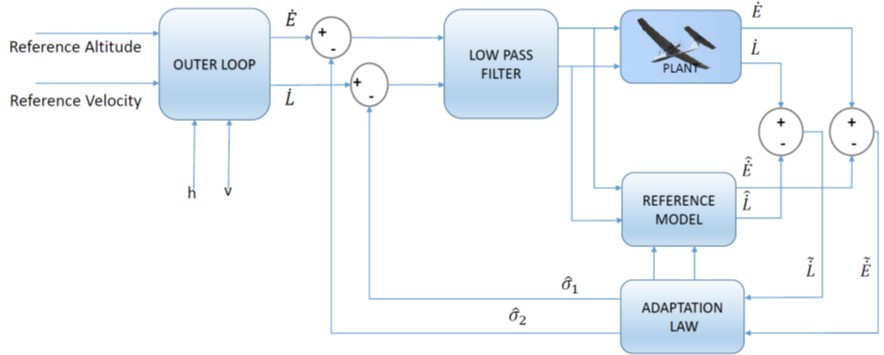
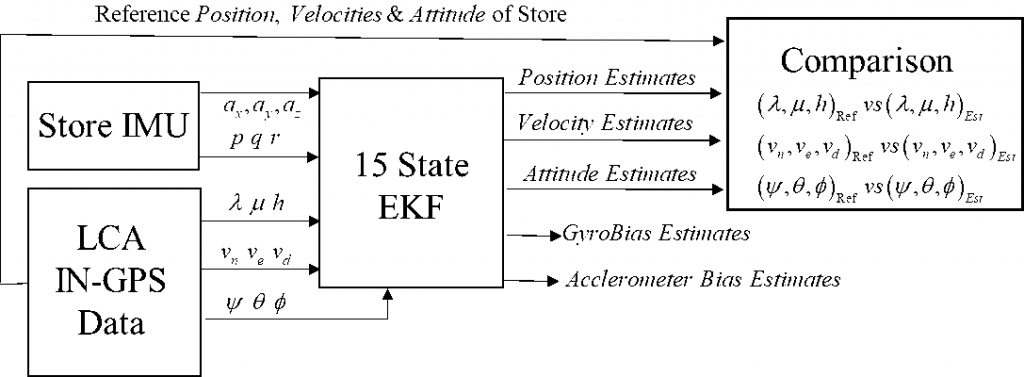
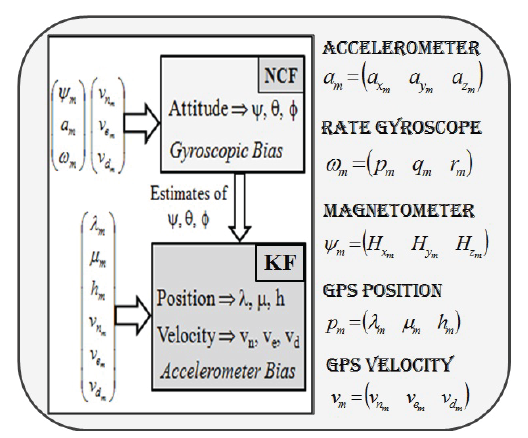
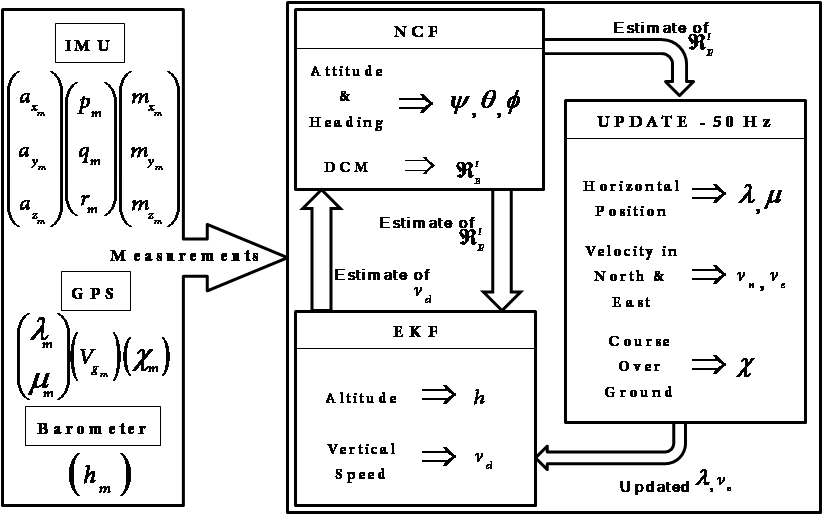
Figure 1 L1 adaptive output feedback Controller based Energy control
एक नए ℒ1 अनुकूलक आधारित नियंत्रण, अनुयायी आधारित विकेन्द्रीकृत गठन उड़ान की जांच के लिए एक निश्चित लाभ रैखिक किरणिक नियामक (एलक्यूआर) नियंत्रण को बढ़ा रहा है। विशेष रूप से, हम इस एल्गोरिथम का प्रस्ताव करते हैं ताकि तीन सूक्ष्म वायु यानों के त्रिकोण को बनाए रखा जा सके। अभिकल्प किए गए नियंत्रण एल्गोरिथम सामान्य और स्पर्शरेखा त्वरण कमांड उत्पन्न करता है, जो ऑटोपियालॉट के आंतरिक लूप द्वारा ठीक से ट्रैक किए जा सकता है।
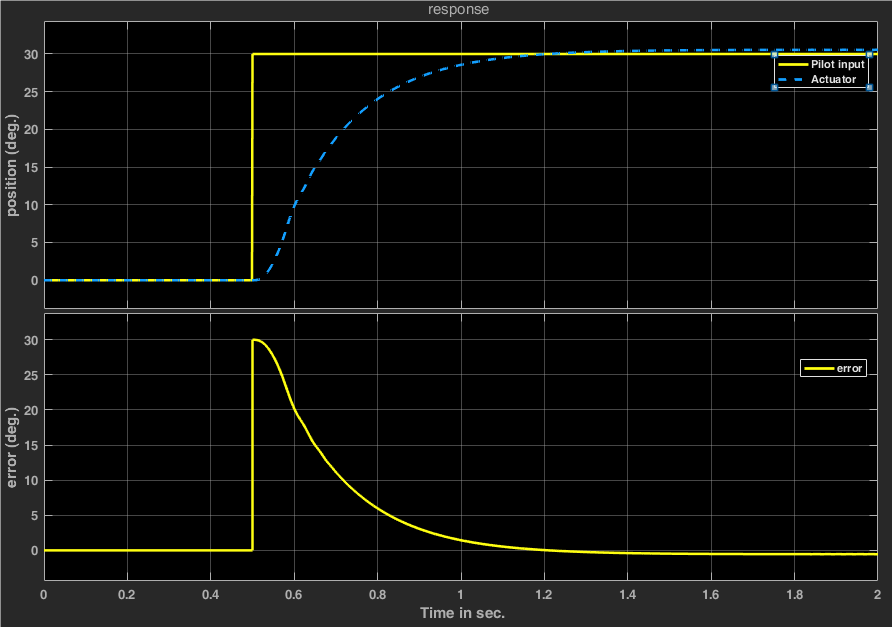
एमएवी के लिए एल1-अनुकूलक आधारित आंतरिक लूप नियंत्रण आर्किटेक्चर अभिकल्प। इसमें एल-1 अनुकूलक नियंत्रण के साथ संवर्धित बेस लाइन स्थिति प्रतिक्रिया नियंत्रक शामिल है। मजबूत अनुकूली नियंत्रण प्रणाली की गतिशीलता में परिवर्तन हेतु अनुकूल है और UAV के लिए बेहतर कमांड ट्रैकिंग की सुविधा प्रदान करता है। रैखिक मॉडल के प्रयोग से अभिकल्प किए गए पिच और रेसिन ट्रैकिंग कंट्रोल लूप का विश्लेषण संभावित विफलताओं के लिए किया गया। अभिकल्प किए गए नियंत्रण लूपों की प्रभावशीलता और अनुकूलन के प्रदर्शन हेतु अनुकरण अध्ययन किए गए।