English
English Hindi
Hindi
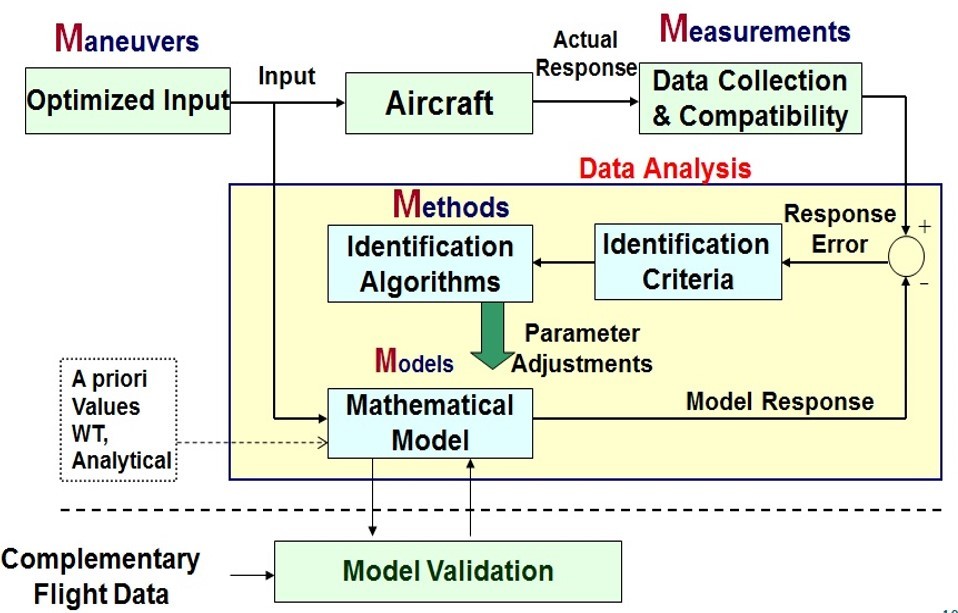
UAV के प्रवृत्ति और हेडिंग आकलन हेतु ईकेएफ आधारित एल्गोरिथम
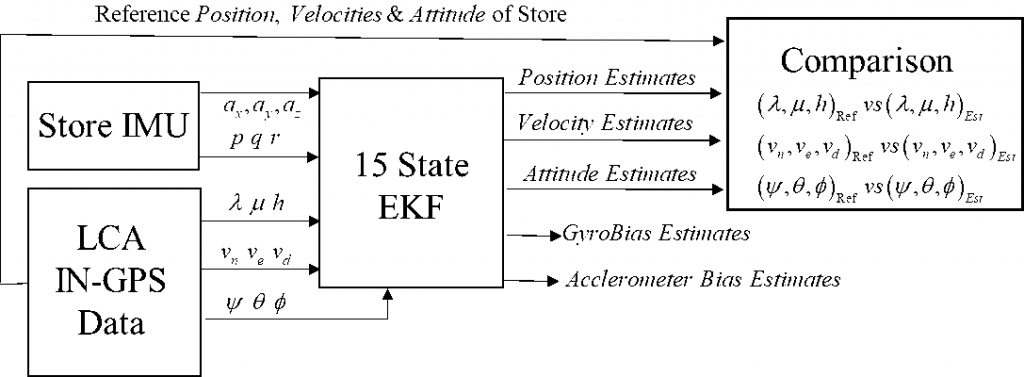
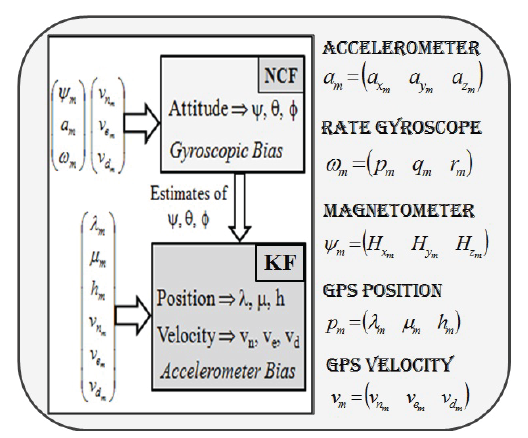
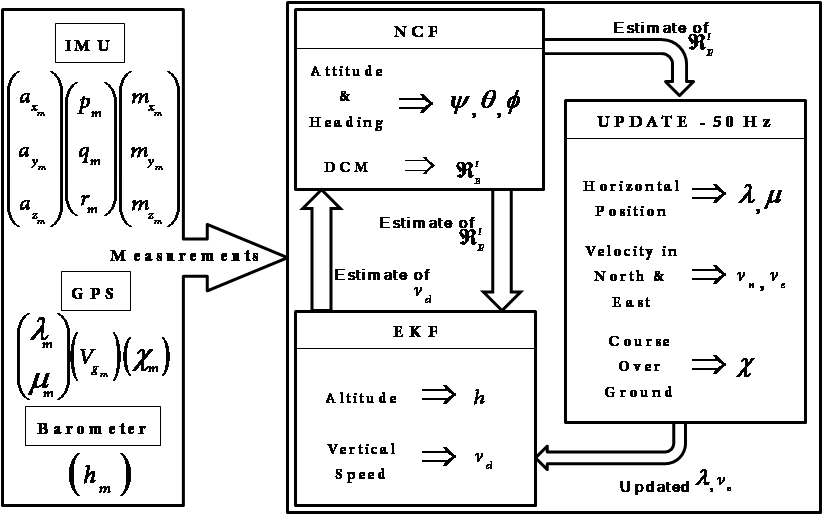
प्रवृत्ति और हेडिंग आकलन हेतु विस्तरित काल्मन फिल्टर (ईकेएफ) सल्युशन कोड इलेक्ट्रो मैकेनिकल सिस्टम (एमईएमएस) इनरशियल मापन यूनिट (आईएमयू) के समर्थन देने वाले कोड फेस जीपीएस मापन के साथ प्रस्तावित किया गया था। 1, 4, 5 और 10 हर्ट्ज की जीपीएस अपडेट दर माना गया जबकि आईएमयू अपडेट दर को 40 हर्ट्ज मान लिया गया। 500एस की कुल अनुकरण अवधि के लिए 20 एस और 15 एस के जीपीएस आउटेज अवधि माना जाता था। जीपीएस मापन की भूमिका और प्रवृत्ति तथा हेडिंग आकलन हेतु इसका अपडेट दर स्पष्ट रूप से बताया गया है। ईकेएफ का अभिकल्प, विकास और अनुकरण अध्ययन किया जा रहा है। प्रस्तावित एस्टिमेटर की मजबूती की जांच 1000 मोंटे कार्लो अनुकरण प्रत्येक 500 एस को जीपीएस आउटेज के साथ और बिना की जाती है।