
 English
English हिन्दी
हिन्दी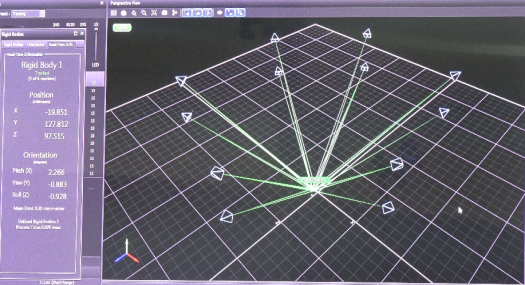
Motion Capture Laboratory
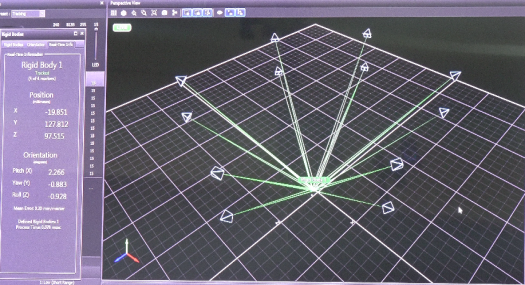
The NALMAC uses a commercial indoor motion capture system both as the source of indoor positioning information for autonomous flight and as a high accuracy reference system for validating other indoor positioning solutions. The system consists of sixteen high speed IR cameras. Each camera has the resolution of 1 megapixel and captures 10-bit grey scale images (maximum 1120 × 896 pixels) up to 2000 times per second. In the full resolution, however, the rate is limited to 250 frames per second. The system is installed in a 9.5 × 6 × 2.45 meters room and the camera placement as well as the coordinate system axes used are depicted in figure . The cameras illuminate the scene with infrared light which is reflected by a set of markers attached to a tracked physical object. The configuration of the reflective markers defines an object and its position and orientation is computed in real-time. The cameras are connected to the Giganet switch which is also responsible for time synchronization of the system. The switch connects to a PC running the software for data collection and analysis. From there the motion tracking data can be logged and also retrieved in real-time to be used for, for example, autonomous flight of a UAV.

Specifications
Sensing Volume: ~9.5 × 6 × 2.45 meters of capture space, over 7m distance nominal
Minimum Sensing Distance: 0.5m
Position Resolution: 0.015mm at 1.2m distance (smallest detectable position change)
Number of Markers: three (minimum)
Accuracy: Up to 0.10mm (RMS, 1D, nominal), 0.25mm (RMS, 3Dcombined, nominal) for standard calibration range
Data Latency:
Produces positional error less than 0.3mm and rotational error less than 0.05°. It varies mildly on the capture environment, but it is often even better than those figures.
Potential Applications in this facility:
- Swarm Robotics
- Robotic Hand Grasping
- Robotic Arm Validation
- Assistive Devices
- Robotic-assisted gait
- Multi-Robot Systems
- Data Fusion (Position and Orientation Validation)
- System Identification (Flapping wing, Perch Landing etc)
Potential clients of this facility:
Aircraft Industry
University
Research Laboratories

