English
English Hindi
Hindi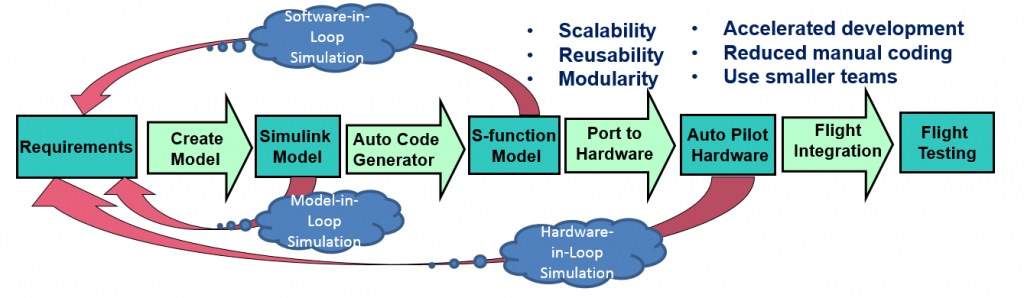
मॉडल आधारित अभिकल्प दृष्टिकोण: एमएवी ऑटोपायलट कार्यात्मकता अभिकल्प
उड़ान नियंत्रण अनुप्रयोगों के लिए वांतरिक्ष क्षेत्र में मॉडल आधारित अभिकल्प ढांचे लोकप्रिय हो रहे हैं। यह निम्नलिखित अवधारणाओं का समर्थन करता है -
- एक समान अभिकल्प प्रदान करना
- आवश्यकतानुसार अभिकल्पों की रचना
- अभिकल्प के साथ परीक्षण विधियों को एकीकृत करना
- अनुकरण के माध्यम से एल्गोरिथम रिफाइनिंग
- स्वचालित एम्बेडेड सॉफ्टवेयर कोड का निर्माण
- परीक्षण मॉड्यूलों का पुन:प्रयोग
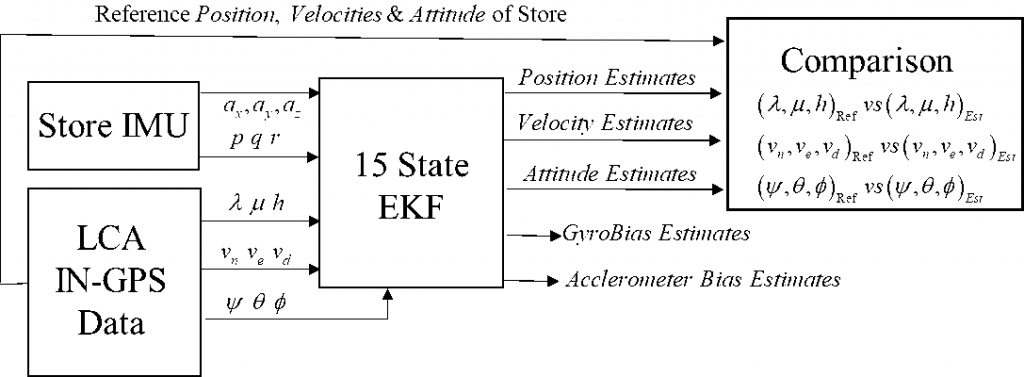
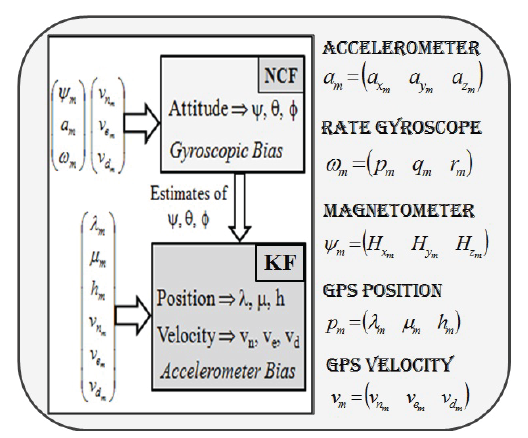
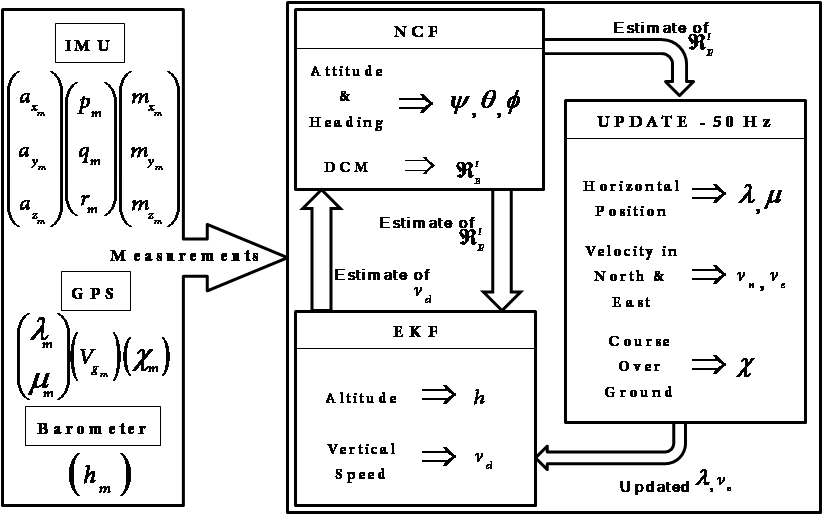
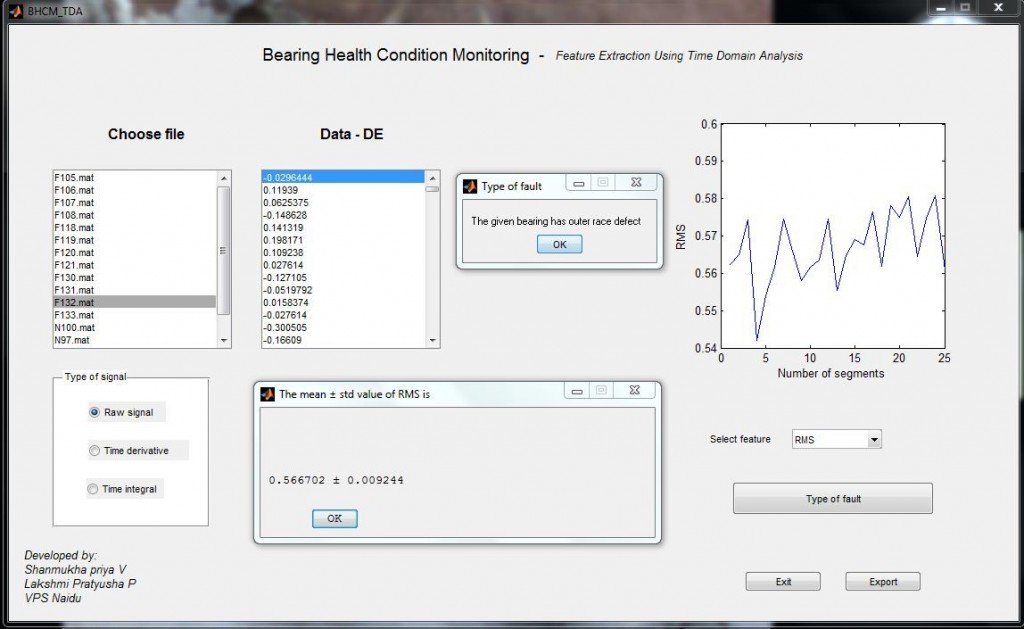
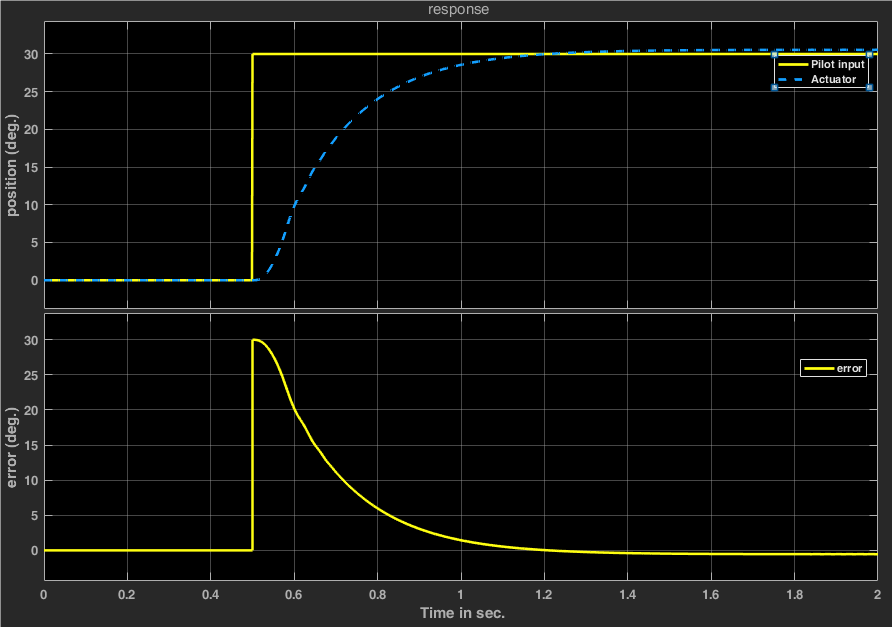
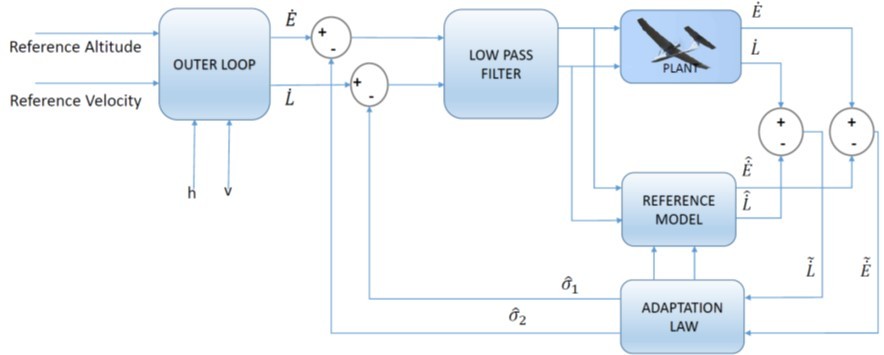
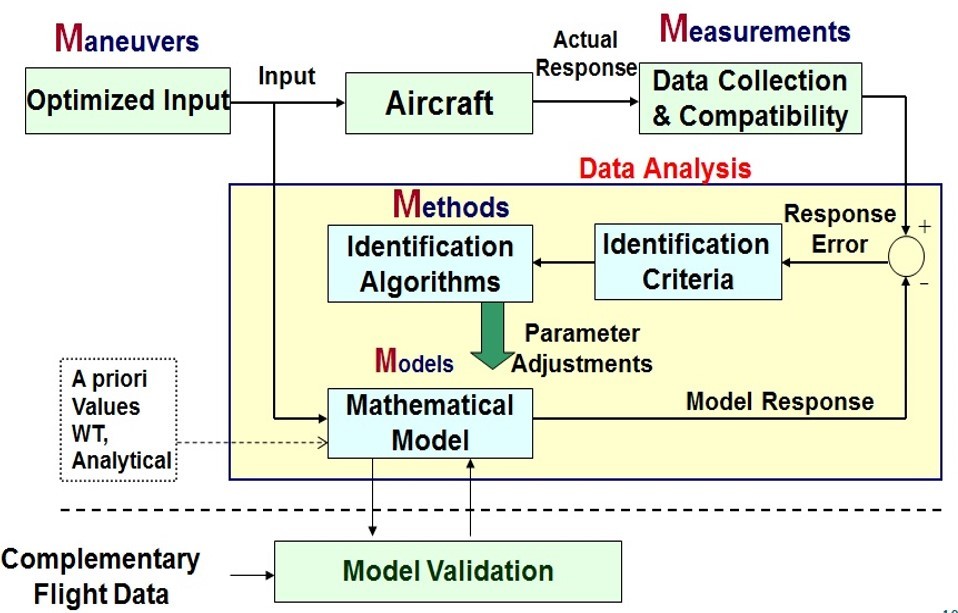
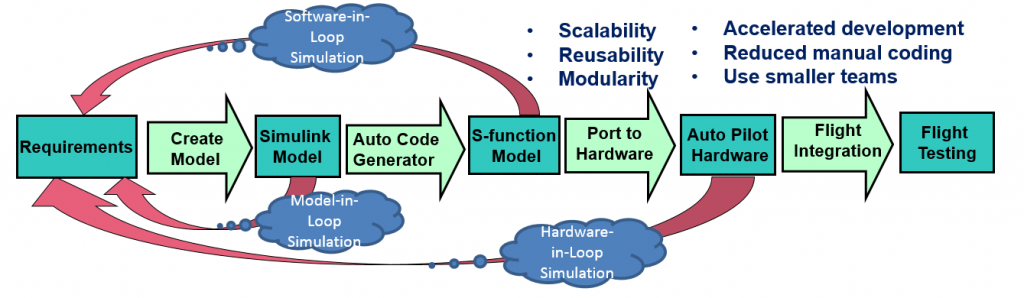
वर्तमान कार्य में, मुख्य उद्देश्य नियंत्रक के लिए ऑटोकोड तैयार करना और यान पर ऑटोपायलट सॉफ्टवेयर के एकीकरण को अनुकरण द्वारा यान पर कार्यान्वयन के लिए सहज एकीकरण करना है। यह मैटलैब/सिमुलिंक के प्रयोग से प्राप्त किया जाता है। सिमुलिंक में संयंत्र मॉडल को लागू किया गया है। लूप सिमुलेशन (एमआईएलएस) में एक मॉडल बनाने के लिए संयंत्र मॉडल के चारों ओर सिमुलिंक में नियंत्रण, अनुमान और पथ नियोजन एल्गोरिथम भी कार्यान्वित किए जाते हैं। वास्तविक समय अनुकरण चार चरणों में किया जाता है जिनमें से प्रत्येक एक विशिष्ट उद्देश्य से होता है जैसे कि
- लूप सिमुलेशन में सॉफ़्टवेयर (एसआईएलएस)
- रैपिड कंट्रोल प्रोटोटाइपिंग (आरसीपी)
- लूप सिमुलेशन में प्रोसेसर (पीआईएलएस)
- लूप सिमुलेशन में हार्डवेयर (एचआईएलएस)
एसआईएलएस में संकलित ऑटोपायलट कोड को समग्र अनुकरण में शामिल किया गया है। डिजाइनर के डेस्क पर ऑनबोर्ड ऑटो कोड की कार्यक्षमता के मूल्यांकन के लिए यह आवश्यक है। मॉडल आधारित अभिकल्प आर्किटेक्चर का चित्रण नीचे दिखाया गया है।
Facilities where this techniques is used: Hardware – in - the loop simulation facility.